Quick Search
QUICK SEARCH
제품검색
최근 본 제품
관심제품
서포트 툴
고객 서비스

설치 치수 | 110mm |
|---|---|
정격 출력 (연속) | 200W |
샤프트 / 기어타입 | 평행 축 기어 헤드 GFV 기어 |
감속비 | 5 |
회전 방향 | 모터와 동일한 방향 |
유형 | IP65 사양 |
케이블 유형 | 없음 |
부속 케이블 | 무 |
전원 입력 정격 전압 | 단상 200-240V / 삼상 200-240V |
전원 입력 전압 허용 범위 | -15 ~ + 10 % |
전원 입력 정격 주파수 | 50 / 60Hz |
전원 입력 주파수 허용 범위 | ± 5 % |
전원 입력 정격 입력 전류 | 단상 2.7 / 삼상 1.5A |
전원 입력 최대 입력 전류 | 단상 4.9 / 삼상 3.4A |
정격 토크 (모터 축) | 0.637N · m |
순간 최대 토크 (모터 축) | 1.15N · m |
허용 토크 | 2.9N · m (16-600r / min) 2.2N · m (800r / min) |
정격 회전 속도 (모터 축) | 3000r / min |
속도 제어 범위 | 16-800r / min |
허용 관성 모멘트 J | 100 × 10 -4 kg · m 2 |
허용 관성 모멘트 J (순간 정지 또는 순간 정역 운전을 할 경우) | 50 × 10 -4 kg · m 2 ※ |
로터 관성 모멘트 J | 0.454 × 10 -4 kg · m 2 |
속도 변동율 (대 부하) | ± 0.2 % 이하 : 조건 0 ~ 정격 토크 정격 회전 속도, 정격 전압, 상온 |
속도 변동율 (대 전압) | ± 0.2 % 이하 : 조건 정격 전압 -15 ~ + 10 %, 정격 회전 속도 무부하 상온 |
속도 변동율 (대 온도) | ± 0.2 % 이하 : 조건 사용 주위 온도 0 ~ + 40 ℃, 정격 회전 속도 무부하 정격 전압 |
모터 부 질량 | 4.8kg (기어 헤드 포함) |
회로부 질량 | 0.8kg |
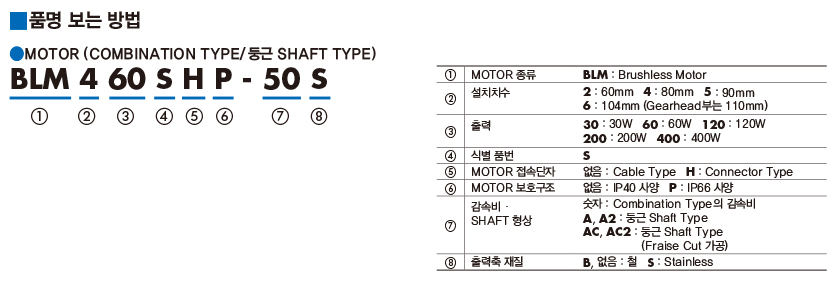
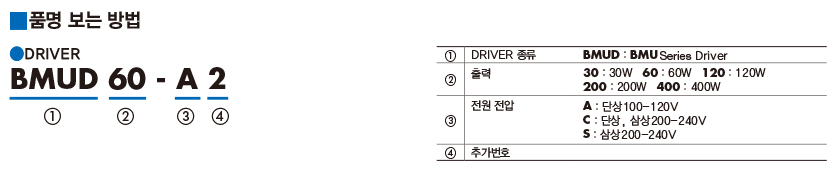
콤비 기어드 모터 유닛 | BLM6200SP-GFV (모터) GFV6G5 (기어 헤드) BMUD200-C (회로) |
|---|
모터, 회로, 기어 헤드, CN1 커넥터 CN4 커넥터, 설치용 나사 , 평행 키, 설명서, 시작하기
※ 디지털 설정에서 감속 시간을 0.1 초 미만으로 설정 한 경우에도 적용됩니다.
| 항목 | 사양 |
|---|---|
| 회전 속도 설정 방법 | 다이얼에 의한 디지털 설정 4 속 설정 가능 |
| 가속 시간 · 감속 시간 |
※ 모터의 가속 시간, 감속 시간은 부하 조건에 따라 달라집니다. |
| 입력 신호 | 포토 커플러 입력 방식 입력 저항 6.6kΩ |
| IN0 ~ IN4 입력 (5 점)에 선택적으로 신호 할당 가능 [] : 초기 설정 [FWD, REV, M0, M1, ALARM-RESET, EXT-ERROR, H-FREE | |
| 출력 신호 | 포토 커플러 오픈 콜렉터 출력 외부 전원 : DC4.5 ~ 30V 100mA 이하 싱크 출력 / 소스 출력 외부 배선에 대응 |
| OUT0, OUT1 (2 점)에 선택적으로 신호 할당 가능 [] : 초기 설정 [ALARM-OUT1, SPEED-OUT, ALARM-OUT2, MOVE, VA, WNG | |
| 보호 기능 | 다음의 보호 기능이 동작 할 때 ALARM-OUT1 출력이 OFF되고, 모터가 자연 정지합니다. 동시에 알람 코드가 표시됩니다. (외부 정지 만 순시 정지) 과전류 주회 과열, 과전압, 부족 전압, 센서 이상, 과부하, 과속, EEPROM 이상, 초기시 센서 이상 초기시 운전 금지 외부 정지 |
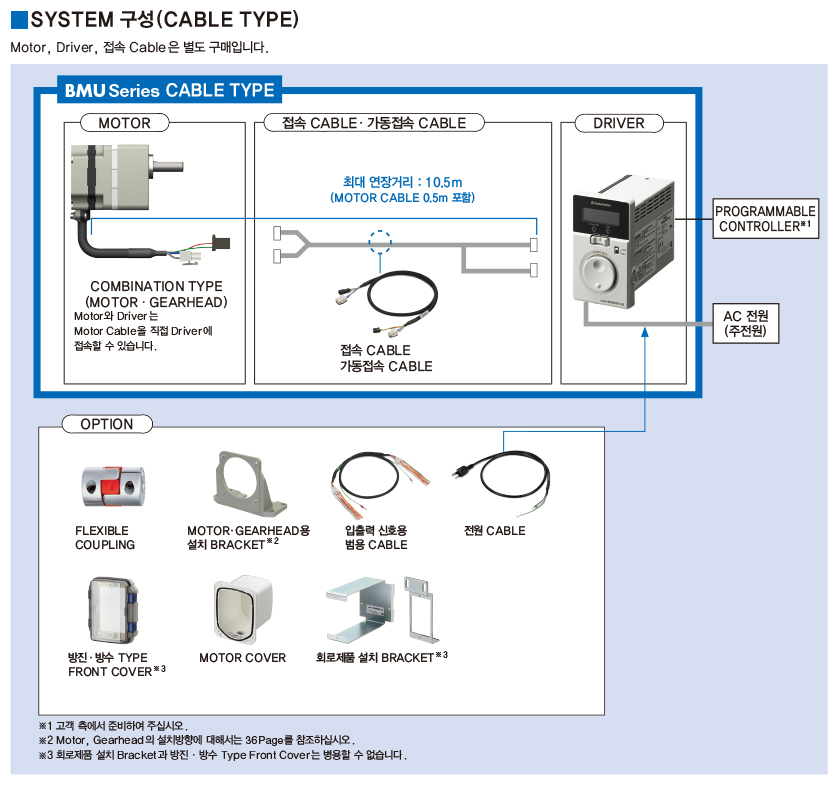
| 최대 연장 거리 |
|
| 시간 정격 | 연속 |
과부하 알람 검출 시간에 대해
연속 운전 영역을 초과하여 사용하는 경우에는 과부하 알람이 발생합니다.
이 과부하 알람 검출 시간을 0.1 ~ 60.0 초 사이에서 임의로 설정할 수 있습니다. (초기 값 : 30.0 초)
그러나 다음의 경우 최대 5 초에서 알람이 발생합니다.
| 항목 | 모터 부 | 드라이버 부 | |
|---|---|---|---|
| 절연 저항 | 상온 상습에서 연속 운전 후 코일와 케이스 사이를 DC500V 메가로 측정 한 값이 100MΩ 이상입니다. | 상온 상습에서 연속 운전 후 전원 단자와 보호 접지 단자 사이 전원 단자와 출력 신호 단자 간을 DC500V 메가로 측정 한 값이 100MΩ 이상입니다. | |
| 절연 내압 | 상온 상습에서 연속 운전 후 코일와 케이스 사이에 50Hz, AC1.5kV를 1 분간인가하여도 이상을 인정하지 않습니다. | 상온 상습에서 연속 운전 후 전원 단자와 보호 접지 단자 사이에 50Hz, AC1.5kV 전원 단자와 출력 신호 단자 사이에 50Hz, AC1.5kV를 1 분간인가하여도 이상을 인정하지 않습니다. | |
| 온도 상승 | 상온 상습에서 정격 연속 운전 후 열전대 법 코일의 온도 상승을 측정 한 값이 50 ℃ 이하 (400W는 60 ℃ 이하) 케이스 표면의 온도 상승을 측정 한 값이 40 ℃ 이하 (400W 50 ℃ 이하) ※ 1 입니다. | 상온 상습에서 정격 연속 운전 후 열전대 법에서 방열판의 온도 상승을 측정 한 값이 50 ℃ 이하입니다. | |
| 사용 환경 | 주위 온도 | 0 ~ + 40 ℃ (동결하지 않을 것) | 0 ~ + 40 ℃ (동결하지 않을 것) [400W 타입의 드라이버 정면 위쪽에 설치 한 경우에만 0 ~ + 35 ℃ (동결하지 않을 것)입니다. 드라이버 앞면 표시부와 다이얼이 붙어있는면입니다. ] |
| 주위 습도 | 85 % 이하 (결로가 없을 것) | ||
| 고도 | 해발 1000m 이하 | ||
| 분위기 | 부식성 가스, 먼지가 없을 것. 방사성 물질 자기장 진공 등의 특수 환경에서의 사용은 불가. | ||
| 진동 | 연속적인 진동이나 과도한 충격이 가해지지 않도록 JIS C60068-2-6 정현파 진동 시험 방법에 따라 주파수 범위 : 10 ~ 55Hz, 편 진폭 : 0.15mm 청소 방향 : 3 방향 (X, Y, Z) 청소 횟수 : 20 회 | ||
| 저장 환경 ※ 2 | 주위 온도 | -20 ~ + 70 ℃ (동결하지 않을 것) | -25 ~ + 70 ℃ (동결하지 않을 것) |
| 주위 습도 | 85 % 이하 (결로가 없을 것) | ||
| 고도 | 해발 3000m 이하 | ||
| 내열 클래스 | 표준 타입 (IP40 사양), IP65 규격 : UL / CSA 규격 105 (A), EN 규격 120 (E) | - | |
| 보호 등급 ※ 3 | 표준 타입 (IP40 사양) : IP40
| IP20 | |
둥근 샤프트 타입 모터 케이스 표면 온도가 90 ℃ 이하가되도록 다음 크기의 방열판 (재질 : 알루미늄)에 설치하십시오.
30W 타입 : 115 × 115mm 두께 5mm, 60W 형 : 135 × 135mm 두께 5mm, 120W 타입 : 165 × 165mm 두께 5mm,
200W 타입 : 200 × 200mm 두께 5mm, 400W 타입 : 250 × 250mm 두께 6mm
저장 환경은 운송을 포함한 단기간의 값입니다.
방진 · 방수를 나타내는 IP 표시는 IEC 60529 및 IEC 60034-5에 규정되어 있습니다.
주의
케이스 : 알루미늄
출력축 : 표준 타입 (IP40 사양), IP65 사양 : S45C
나사 : 스테인레스 (외부 노출 부분 만 보호 접지 단자 제외)
케이스 : 도장 (부착면 제외)
| 출력 | 감속비 | 허용 래디얼 하중 | 허용 축 방향 하중 N | ||
|---|---|---|---|---|---|
| 출력축 끝에서 10mm N | 출력축 끝에서 20mm N | ||||
| 30W | 5 | 80 ~ 3000r / min시 | 100 | 150 | 40 |
| 4000r / min시 | 90 | 110 | |||
| 10,15,20 | 80 ~ 3000r / min시 | 150 | 200 | ||
| 4000r / min시 | 130 | 170 | |||
| 30,50,100,200 | 80 ~ 3000r / min시 | 200 | 300 | ||
| 4000r / min시 | 180 | 230 | |||
| 60W | 5 | 80 ~ 3000r / min시 | 200 | 250 | 100 |
| 4000r / min시 | 180 | 220 | |||
| 10,15,20 | 80 ~ 3000r / min시 | 300 | 350 | ||
| 4000r / min시 | 270 | 330 | |||
| 30,50,100,200 | 80 ~ 3000r / min시 | 450 | 550 | ||
| 4000r / min시 | 420 | 500 | |||
| 120W | 5 | 80 ~ 3000r / min시 | 300 | 400 | 150 |
| 4000r / min시 | 230 | 300 | |||
| 10,15,20 | 80 ~ 3000r / min시 | 400 | 500 | ||
| 4000r / min시 | 370 | 430 | |||
| 30,50,100,200 | 80 ~ 3000r / min시 | 500 | 650 | ||
| 4000r / min시 | 450 | 550 | |||
| 200W 400W | 5,10,15,20 | 80 ~ 3000r / min시 | 550 | 800 | 200 |
| 4000r / min시 | 500 | 700 | |||
| 30,50 | 80 ~ 3000r / min시 | 1000 | 1250 | 300 | |
| 4000r / min시 | 900 | 1100 | |||
| 100 ※ 200 ※ | 80 ~ 3000r / min시 | 1400 | 1700 | 400 | |
| 4000r / min시 | 1200 | 1400 | |||
※ 200W 타입의 단상, 삼상 200-240V 입력 만.
| 출력 | 허용 래디얼 하중 | 허용 축 방향 하중 | |
|---|---|---|---|
| 출력축 끝에서 10mm N | 출력축 끝에서 20mm N | ||
| 30W 60W | 80 | 100 | 모터 질량의 절반 이하 |
| 120W 200W 400W | 150 | 170 | |
| 제품 | 적용 규격 | 인증 기관 |
|---|---|---|
| 모터 | UL 1004-1 CSA C22.2 No.100 | UL |
| EN 60034-1 EN 60034-5 EN 60664-1 | 규격 대응 품 | |
| 회로 | UL 508C CSA C22.2 No.14 | UL |
| EN 61800-5-1 | 규격 대응 품 |
· 규격 인정 품 인증 취득 품명 모터 품명 및 회로 품명입니다.
저전압 지침 EMC 지시문
※ EMC는 배선 · 배치에 따라 달라집니다. 귀하의 장비에 통합 상태에서 EMC의 최종 확인이 필요합니다.
RoHS 지침 (2011 / 65 / EU)의 규제치를 초과하는 물질은 함유하고 있지 않습니다.
인아오리엔탈모터(주)대표이사신 동 진
서울 사무소
서울시 금천구 가산디지털 1로 168, 우림라이온스밸리 C동 807호
대표번호02-2026-0650기술문의080-777-2042
인천 사무소
인천광역시 남동구 앵고개로 490번길 119, 남동공단 144B - 9L
Tel032-819-8721Fax032-819-8671
사업자등록번호139-81-28682
통신판매등록 번호2017 - 인천남동구 - 0852
Copyright 2023. INA ORIENTAL MOTOR Inc. All Rights Reserved.
본 사이트의 컨텐츠는 저작권 보호를 받고 있으며,
모든 이미지와 내용 등의 상업적 이용시에 법의 제재를 받게 됩니다.