Quick Search
QUICK SEARCH
제품검색
최근 본 제품
관심제품
서포트 툴
고객 서비스

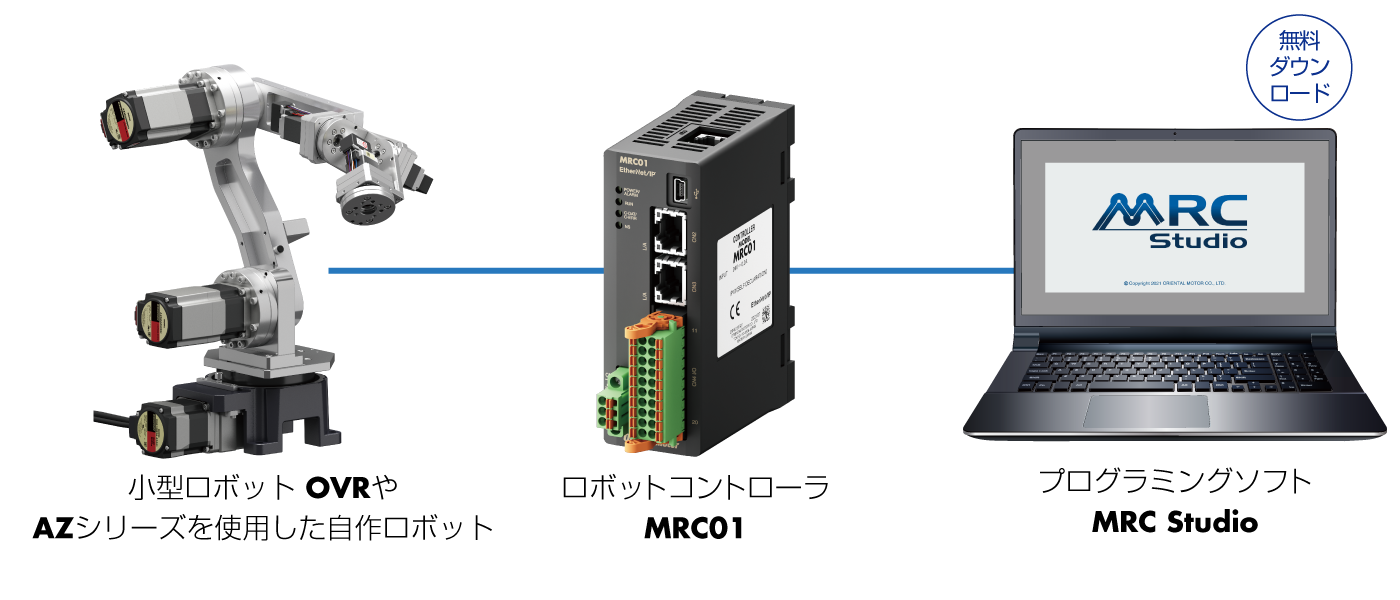
MRC01은 프로그래밍 소프트웨어 MRC Studio에서 설정한 동작 프로그램을 PC만으로 간단하게 티칭, 동작 확인할 수 있습니다.
MRC01과 상위 시스템의 연계는 EtherNet/IP™로 다이렉트 제어. 기존 설비의 제어 시스템을 크게 변경하지 않고 소형 로봇 OVR과 자작 로봇을 간단하게 추가 도입할 수 있습니다.
※ EtherNet/IP™는 ODVA의 상표입니다.
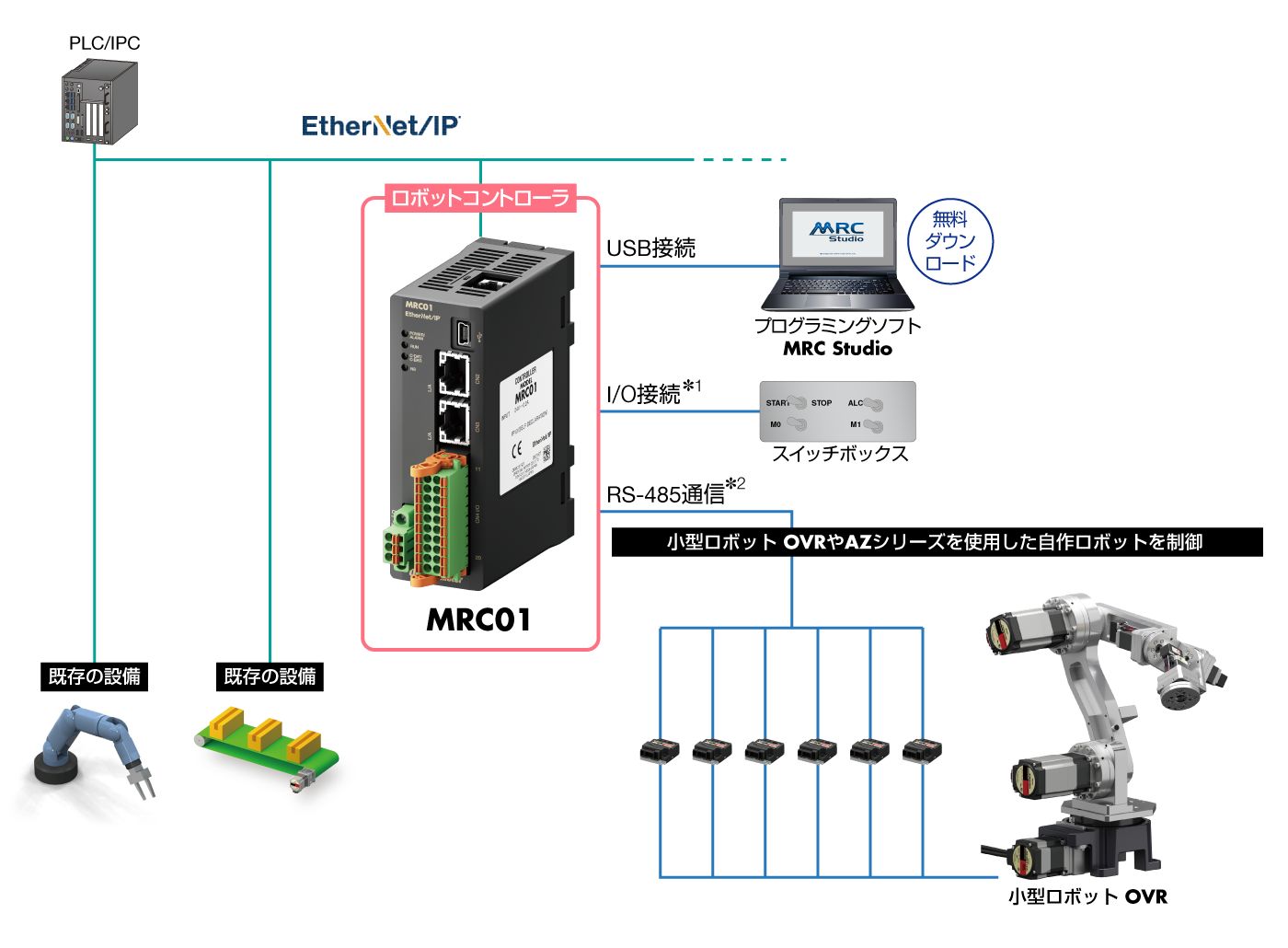
※1 MRC01은 I/O 접속(상위 기기 없음)에서도 움직일 수 있습니다.
※2 MRC01과 AZ 시리즈 드라이버 사이는 RS-485 통신으로 제어합니다.
자작 로봇의 초기 설정부터 동작 프로그램까지 간단하게 설정할 수 있는 「프로그래밍 소프트 MRC Studio」를 준비하고 있습니다.
또, MRC01과의 통신 없이 티칭이 가능한 「MRC Studio Simulator」도 준비하고 있습니다. MRC Studio Simulator로 작성한 프로그램은 실제 로봇 도입 시 그대로 사용할 수 있습니다.
소프트웨어는 모두 무료로 다운로드 할 수 있습니다.
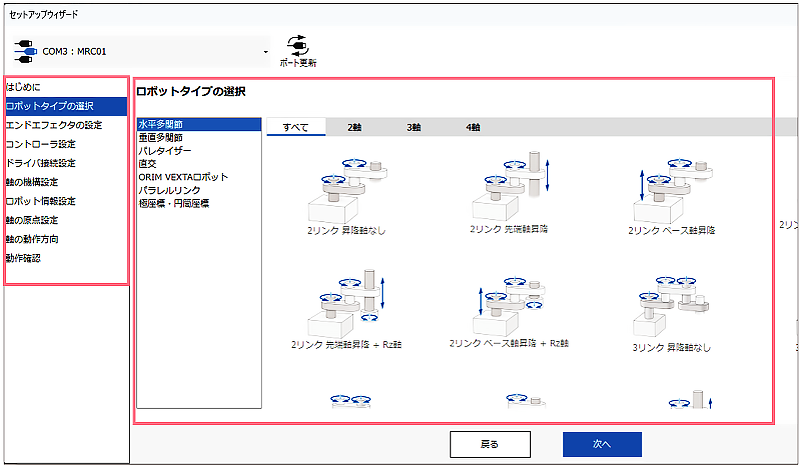
로봇 타입의 선택이나 기구 정보의 입력 등, 일련의 초기 설정을 마법사 형식으로 할 수 있습니다. 일러스트를 보면서 지침의 지시에 따라 설정하면 처음이라도 단시간에 로봇의 초기 설정을 할 수 있습니다. 소형 로봇 OVR은 기구 정보가 미리 입력되어 있으므로 보다 간단하게 초기 설정을 할 수 있습니다.
절차에 따라 설정
마법사 메뉴에 따라 로봇의 초기 설정을 진행합니다.
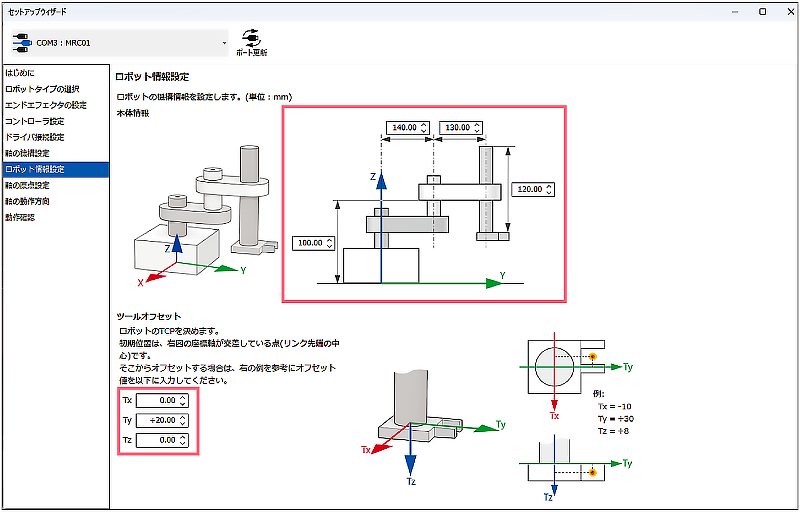
로봇의 일러스트를 보면서 암의 길이 등의 치수를 입력
치수는 일러스트의 입력란에 직접 입력합니다.
로봇 타입 선택
(대표 예)
| 수평다관절(스칼라) | 수직 다관절 | 팔레타이저 | 병렬 링크 |
|---|---|---|---|

|

|

|

|
| 3링크 선단축 승강 | 3링크 베이스축 선회+Rz축 | 2링크 기구 베이스축 직동+Rz축 | 병렬 링크 + Rz 축 |
| 직교 | 소형 로봇 OVR 수직 다관절 |
소형 로봇 OVR 수평 다관절 |
|
|---|---|---|---|

|

|

|

|
| XYZ | 평면 갠트리(XY) | OVR6048K1-V(6축) | OVR3041K3-H(3축) |
프로그램 작성은 명령을 선택하는 간단한 방법입니다. 사다리와 같은 전문 지식이 없어도 직관적으로 프로그램을 만들 수 있습니다. P to P 운전, 직선 보간 운전, 원호 보간 운전, 아치 모션 등에 대응하고 있습니다. 또한 상위 제어 기기에서 EtherNet/IP 경유로 직접 운전 데이터를 실행할 수도 있습니다.
필요한 명령을 드래그 앤 드롭
"Command"란에서 원하는 동작을 선택하고 "Sequence"란에 드래그 앤 드롭하면 "Command Setting"란이 표시됩니다.
목표 위치 및 속도 설정
목표 위치의 좌표·이동량의 지정, 속도를 커맨드 설정란에 입력합니다.

| 명령 | ||||
|---|---|---|---|---|

|

|

|

|

|
| P to P 제어 | 직선 보간 | 원호 보간(헬리컬 보간) | 아치 모션 | 팔레타이징 |
프로그램의 운전 시간 표시, 로봇의 가동 범위 등을 고려한 프로그램 내용의 검증이 가능합니다.
3D 그래픽에서 실제 기계를 움직이지 않고 동작을 확인할 수 있습니다.
※ 시뮬레이션과 실기의 동작은 차이가 발생할 가능성이 있습니다.
※ 시뮬레이션은 MRC01과의 통신이 필요합니다.


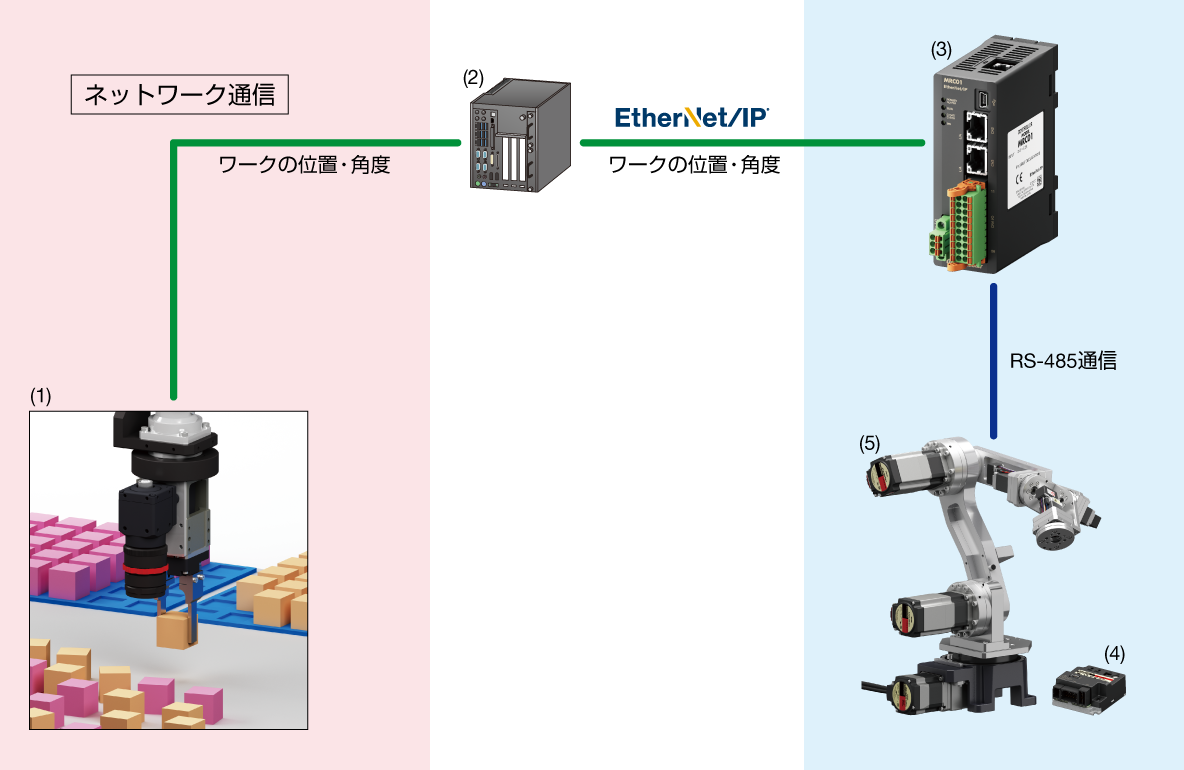
로봇 컨트롤러 MRC01은 비전 센서로 취득한 워크의 위치나 각도의 정보를 사용하여 로봇을 운전하기 위한 편리한 기능을 탑재하고 있습니다.
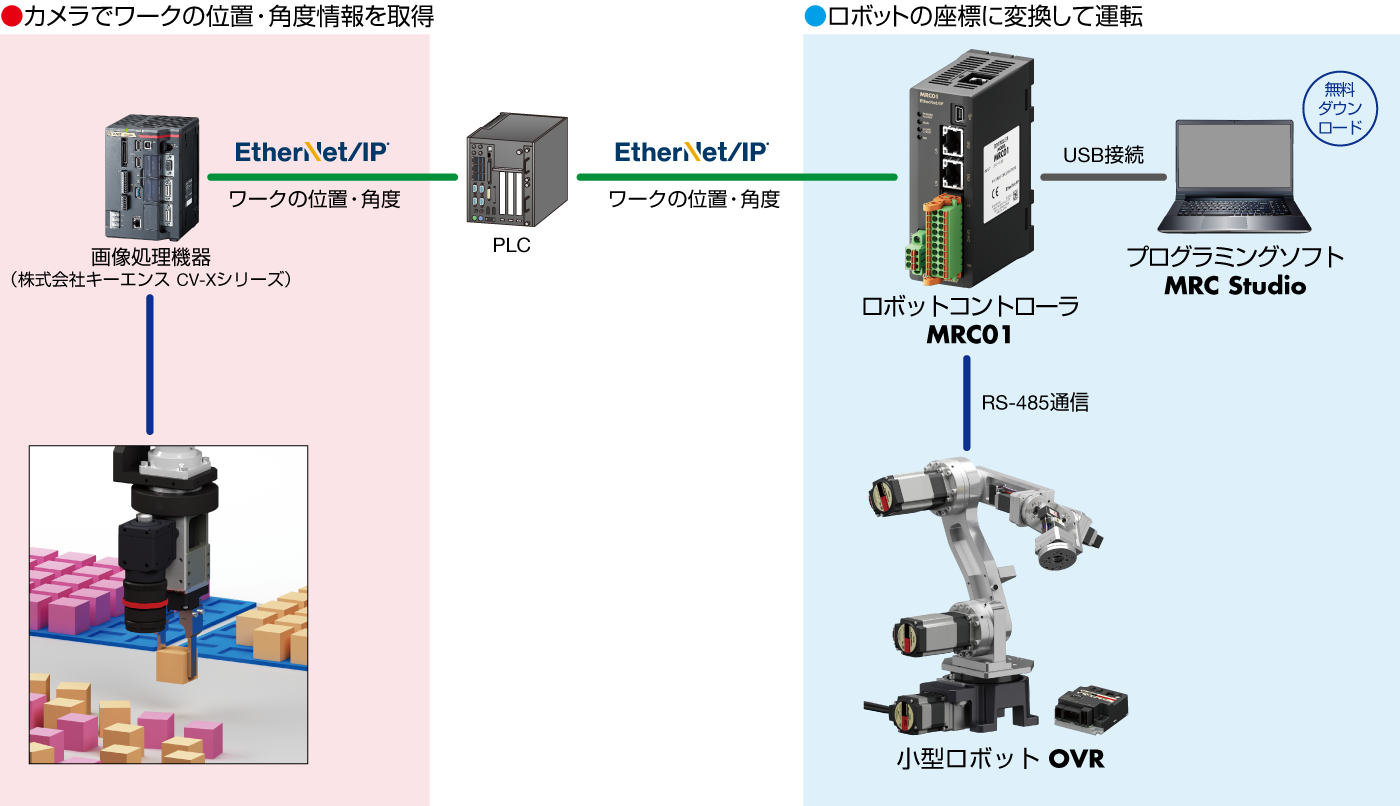
화상 처리 기기, PLC의 대응 기종에 대해서
상기 구성도는, 주식회사 키엔스제 CV-X 시리즈와의 접속예입니다.
캘리브레이션 정보
2D 카메라와 함께 작동하려면 MRC Studio를 사용하여 미리 보정합니다. 일러스트를 보면서 화면의 지시에 따라 조작하는 것만으로 간단하게 설정할 수 있어 보정 공수를 삭감할 수 있습니다. (카메라는 2대까지 캘리브레이션이 가능합니다.)
MRC01과의 조합으로 동작 확인한 비전 센서나 화상 처리 소프트웨어입니다.
| 메이커 | 비전 센서, 화상 처리 소프트웨어 | 시스템 구성 예 |
|---|---|---|
| Keyence | XG-X | ① |
| CV-X | ||
| VS-L | ② | |
| 미쓰비시 전기 | VS80 | |
| 코그넥스 | In-Sight 2800M | |
| In-Sight 8000 | ||
| MVTec Software | MERLIC | ③ |
| HALCON | ||
| CKD | Facilea |
로봇 비전 시스템의 일반적인 구성 예입니다.
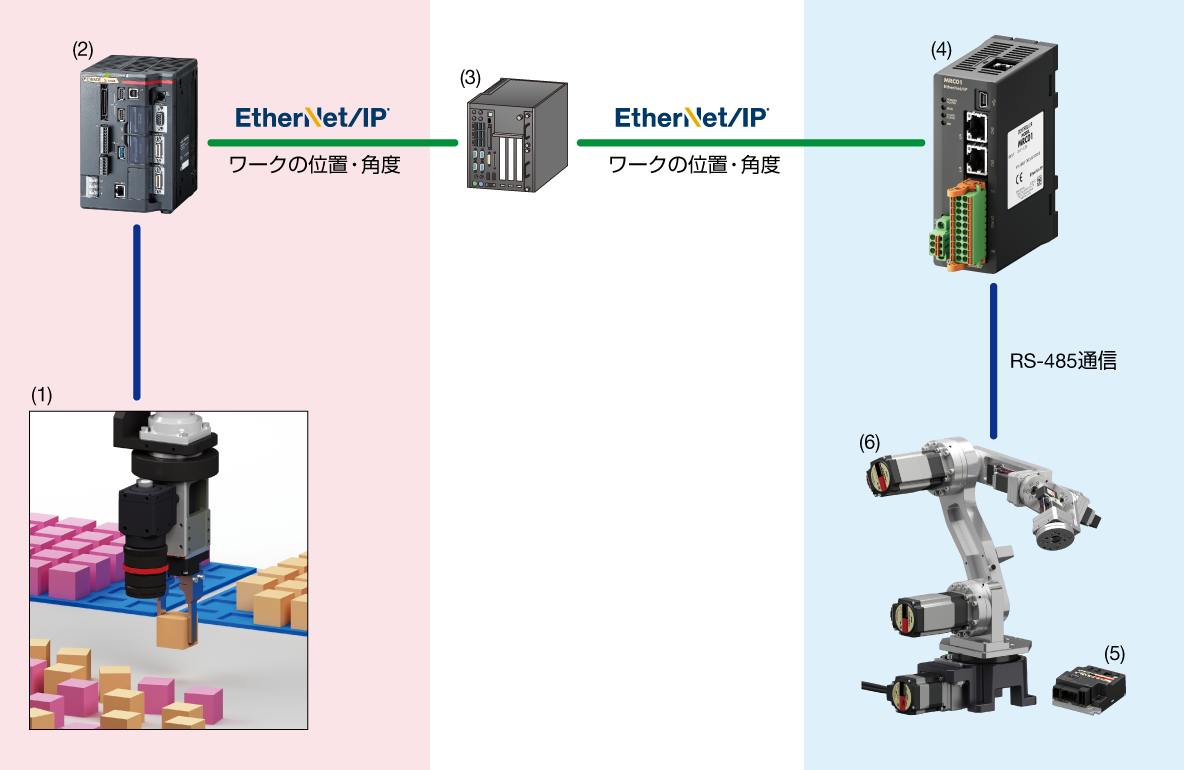
준비할 기기
카메라 컨트롤러가 카메라에 내장된 구성 예입니다.
간단한 시스템 구성이 가능합니다.
준비할 기기
화상 처리 소프트웨어 화면(예:COGNEX)

카메라 컨트롤러의 기능을 PC(소프트웨어)로 실현하는 구성예입니다.
MRC01의 제어는 PC 또는 PLC로 행합니다.
PC로 제어하는 경우는 PLC리스로 로봇 비전 시스템을 구축할 수 있습니다.

준비할 기기
※필요에 따라 준비해 주십시오.
화상 처리 소프트웨어 화면(예:MERLIC)

워크의 위치 정보 검출, 치수·외관 검사 등, 2D 카메라와의 제휴로 실현하는 자동화는 많이 있습니다. 일례를 소개합니다.
위치 보정
번잡하게 늘어선 워커를 정렬(고정 카메라 방식)
색인식
색이 다른 워크를 선별(핸드아이 방식)
여러 작업 영역에서 동일한 작업을 반복하는 경우에 유효합니다. 운전 프로그램을 변경하지 않고 작업의 시작점을 변경할 수 있습니다.
임의의 위치를 3개까지 원점으로 설정할 수 있습니다. 설정은 MRC Studio 티칭 화면에서 수행합니다.

원점으로 설정할 위치까지 로봇을 움직입니다.
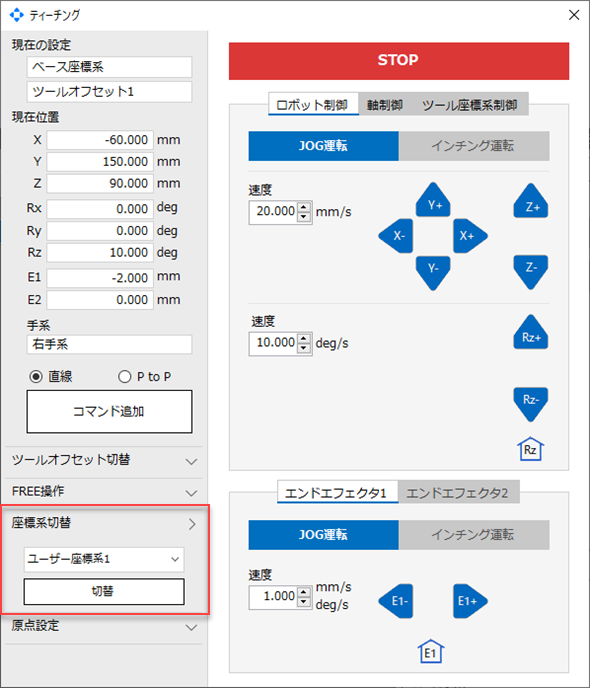
좌표계 선택
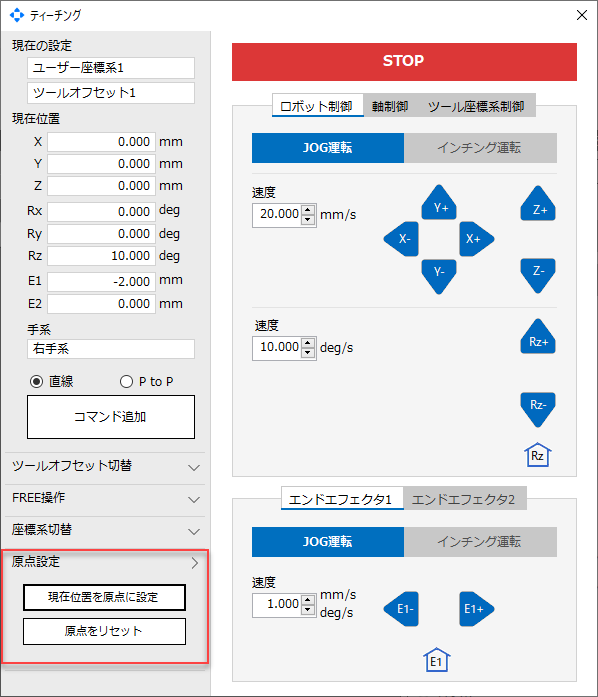
현재 위치를 원점으로 설정
좌표계는 운전 프로그램의 좌표계 전환 명령으로 변경할 수 있습니다. 한 프로그램에 여러 좌표계 전환 명령을 추가할 수 있습니다.
MRC Studio Simulator는 로봇 본체나 MRC01이 없어도 실제 움직임을 상정한 시뮬레이션이 가능한 소프트웨어입니다.
MRC Studio Simulator로 작성한 운전 프로그램은 실제 로봇 도입 시 그대로 사용할 수 있습니다.

둘 다 무료로 다운로드할 수 있습니다. 기능의 차이는 다음과 같습니다.
| 품목 | MRC Studio Simulator | MRC Studio(제품판) |
|---|---|---|
| 로봇 컨트롤러 MRC01과의 통신 | - | ○ |
| 설정 | △ | ○ |
| 로봇 컨트롤러 MRC01이나 드라이버와 통신하는 항목은 설정할 수 없습니다. | ||
| PC에 설정 데이터 파일 저장 | ○ | ○ |
| 파일 열기 | ○ | ○ |
| .mrcxt 파일을 엽니다. 또한 설정 프로그램 샘플 파일도 준비되어 있습니다. |
.mrcx 파일을 엽니다. | |
| MRC Studio Simulator로 만든 데이터 파일 가져오기 | - | ○ ※ |
| 티칭 | ○ | ○ |
| 운전 프로그램 작성 | ○ | ○ |
| 테스트 운전 | ○ | ○ |
| 파라미터 설정 | △ | ○ |
| 설정할 수 없는 파라미터가 있습니다. 자세한 내용은 MRC Studio Simulator의 도움말 > 사용법 보기에서 확인하십시오. |
||
| 모니터 | △ | ○ |
모니터 할 수 있는 것은 이하 내용입니다.
외부 기기와의 접속이 필요한 신호계의 정보는 모니터할 수 없습니다. |
※ MRC Studio Simulator 에서는 각 축의 부하 조건은 고려되어 있지 않기 때문에, 실제의 움직임에 차이가 생길 가능성이 있습니다.
처음으로 실제 기계를 작동시킬 때는 운전 속도율을 낮추어 시험해 보는 것을 추천하고 있습니다.
소형 로봇 OVR 외에 AZ 시리즈 및 AZ 시리즈를 탑재한 전동 액추에이터와 조합할 수 있습니다.

MRC Pendant for Tablet(티칭 펜던트 앱)을 설치한 태블릿형의 티칭 펜던트를 준비하고 있습니다.
※ 일본 국내 전용품입니다.
인아오리엔탈모터(주)대표이사신 동 진
서울 사무소
서울시 금천구 가산디지털 1로 168, 우림라이온스밸리 C동 807호
대표번호02-2026-0650기술문의080-777-2042
인천 사무소
인천광역시 남동구 앵고개로 490번길 119, 남동공단 144B - 9L
Tel032-819-8721Fax032-819-8671
사업자등록번호139-81-28682
통신판매등록 번호2017 - 인천남동구 - 0852
Copyright 2023. INA ORIENTAL MOTOR Inc. All Rights Reserved.
본 사이트의 컨텐츠는 저작권 보호를 받고 있으며,
모든 이미지와 내용 등의 상업적 이용시에 법의 제재를 받게 됩니다.